난간 뛰어넘고 상자 올라타고 네 발로 걷는 로봇이 파쿠르 하네
난간 뛰어넘고 상자 올라타고 네 발로 걷는 로봇이 파쿠르 하네
파쿠르는 정해진 규칙 없이 도시에 세워진 인공물을 이용해 신속하게 이동하는 운동이다.
오직 사람의 운동감각과 체력만으로 도심 속 장애물을 헤쳐 나가는 극한의 스포츠다.
과학자들이 다리의 힘을 이용해 점프를 하고 계단식 구조물을 성큼성큼 거침없이 움직이는 파쿠르 선수의 움직임을 따라하는 로봇을 개발했다.
지진이나 붕괴 현장처럼 장애물이 많은 곳에서 로봇이 인명 구조 활동을 수행할 날이 머지 않았다는 평가가 나온다.
스위스 취리히연방공대(ETH)와 엔비디아 연구진은 14일 국제 학술지 ‘사이언스 로보틱스’에 파쿠르를 하는 네 발로 걷는 로봇 ‘애니멀(ANYmal)’을 개발했다고 밝혔다.
연구진은 파쿠르의 동작에서 사족보행 로봇의 운동 능력을 개선할 힌트를 찾아 인공신경망 기술을 활용해 애니멀을 개발했다.
네 발로 걷는 방식은 개처럼 다리 4개를 가진 형태여서 넘어지지 않고 안정적으로 걷고 거친 지형에서도 쉽게 움직일 수 있다는 장점이 있다.
하지만 민첩성은 두 발로 걷는 이족로봇보다 상대적으로 떨어진다는 평가를 받는다.
돌발 상황이 많은 자연환경에서 발생할 수 있는 사고 대처 능력이 부족하다는 의미이기도 하다.
애니멀은 비록 사람처럼 두 발로 걷지 않지만 네 발로 걷고 뛰어 장애물 지대를 거침없고 재빠르게 헤쳐나가는 능력이 있다.
연구진은 인공신경망에 파쿠르 선수의 움직임을 학습한 후 애니멀 로봇의 움직임을 빠르게 제어하게 했다.
시스템은 외부 환경 인식, 보행, 경로 탐색 등 3가지 기능을 가진 개별적인 부품으로 구성했다.
인공 장애물 환경에서 얼마나 빠르고 안정적으로 움직일 수 있는지 시험한 결과에서 로봇은 성공적으로 임무를 수행했다.
실제로 실험 과정은 실제 파쿠르 선수의 운동 능력을 평가하는 방식과 거의 동일하게 진행했다.
장애물 오르기, 난간 뛰어넘기, 낮은 장애물 통과하기 같은 여러 과제를 주고 얼마나 안정적으로 움직이는지 확인했다.
애니멀 로봇은 초속 2m 움직임으로 빠르게 이동하며 장애물을 거뜬히 헤치고 움직이는 데 성공했다.
장애물을 오르는 시험에서는 최대 높이 1m의 박스를 올라가는 데 성공했다.
애니멀 로봇은 마치 파쿠르 선수가 벽을 타고 오르듯 앞발로 벽의 상단을 잡은 후 뒷발을 지지대 삼아 손쉽게 장애물을 오르는 모습을 보였다.
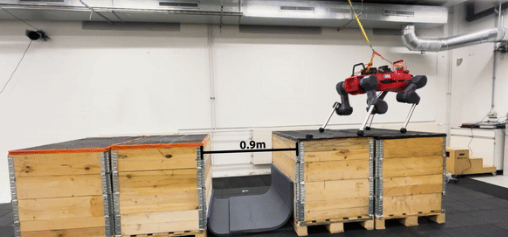
1m 간격의 난간을 뛰어넘는 실험도 성공적으로 통과했다.
한쪽 발을 내디뎌 난간에 걸친 후 나머지 다리를 이용해 순간적으로 점프하면서 안전하게 뛰어넘었다.
연구진은 애니멀 로봇을 재난 현장에서 탐색과 구조 용도로 활용할 수 있다고 설명했다.
기존 로봇 기술로는 통과하기 어려운 장애물이 많은 지역에서 활동하는 능력을 갖춘 덕이다.
지금도 재난 현장용 로봇은 인간이 직접 하기 어렵거나 위험한 작업을 대신할 수 있어 활발히 연구되고 있다.
하지만 여전히 기술적 한계로 아직 현장 투입은 어려운 상황이다.
사람보다 큰 거대 규모의 로봇이 재난 현장에서 활약했다는 소식이 이따금 들려온다.
하지만 대부분 화재 현장에 국한된다. 하지만 여전히 붕괴 위험이 큰 지진, 건물 붕괴 현장에서는 소규모 로봇의 투입이 필요한 상황이다.
다비드 휠러 연구원은 “파쿠르 선수 수준의 민첩성을 보이면서도 로봇의 복잡한 움직임까지 재현한 연구”라며
“붕괴한 건물 잔해나 복잡한 자연 속 장애물에 구애받지 않고 활동할 수 있는 재난 대응 로봇으로 활용할 수 있을 것으로 기대된다”고 말했다.


