스마트폰 크기 수중로봇 얼음 위성의 지하 바다 누빈다
스마트폰 크기 수중로봇 얼음 위성의 지하 바다 누빈다
연으로 전기 만들고 바닷물로 탄소 포집 기후변화 대응하는 신기술
외계 생명체를 쫓는 우주생물학자들은 태양계 내의 몇몇 위성에 상당한 양의 물이 매장돼 있을 것으로 추정하고 있다.
목성의 위성인 유로파와 가니메데, 토성의 위성인 엔켈라두스는 대표적인 후보지로 꼽힌다.
이들 위성의 표면은 두꺼운 얼음층으로 덮여 있고 그 아래로 소금 성분의 바다가 있을 것으로 추정된다.
미국과 유럽은 태양계 행성과 위성에 물의 흔적을 찾기 위해 다양한 탐사선을 보내는 한편 직접 얼음층을 뚫고 들어가 탐사하는 방안을 추진하고 있다.
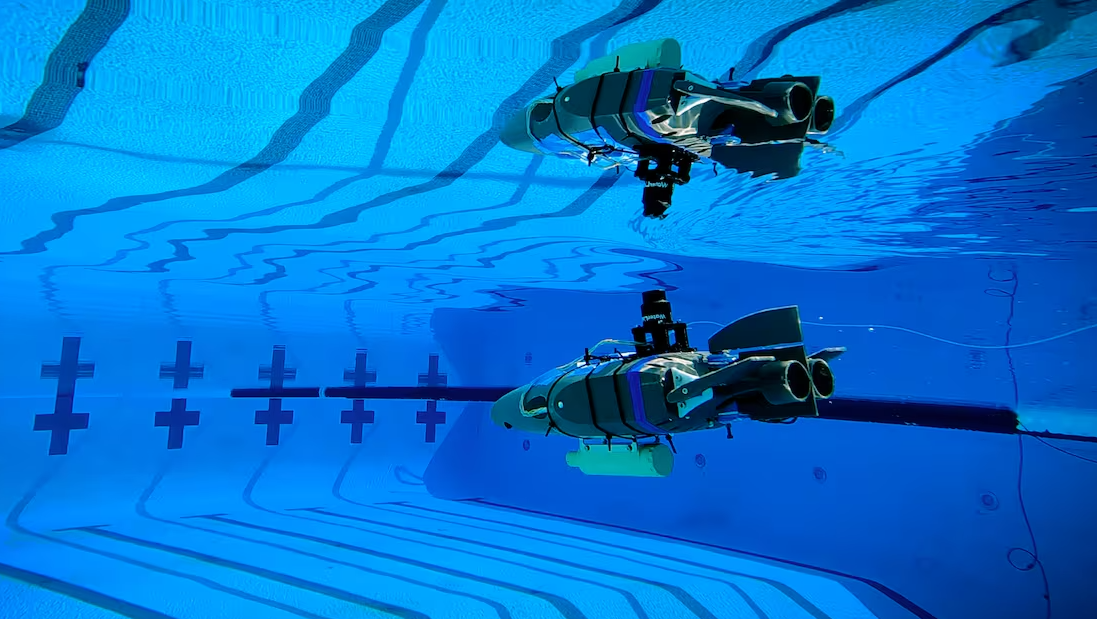
영국의 텔레그래프에 따르면 미국항공우주국(NASA·나사)은 최근 목성과 화성 위성의 얼음층 아래 바닷속을 무리 지어 누비며
생명체 신호를 탐색할 수중 탐사로봇을 개발하고 최근 수중 시험에 성공했다.
지구 해저를 탐색하는 무인탐사선이 개발된 적은 있다. 하지만 지구 밖 다른 천체에 있는 바다에서 활동할 수중로봇을 개발한 것은 처음이다.
지금까지 연구에 따르면 목성의 위성 유로파에는 지구의 모든 바다를 합친 것보다 훨씬 많은 물이 있는 것으로 추정된다.
지금도 유로파에서는 바다에 열을 공급하고 생명체에 필요한 영양소를 생성하는 지질 활동의 흔적이 발견된다.
과학자들은 외계에서 생명체를 찾으려면 물의 흔적을 추적해야 한다고 말한다.
하지만 태양계 위성의 얼음층 밑은 아직까지 인간의 눈과 발이 닿지 못하고 있다.
나사는 2021년부터 72만5000달러(10억7000만원)를 투자해 ‘독립적인 초소형 수영로봇을 이용한 감지(SWIM)’라는 프로그램을 추진하고 있다.
개발 예산은 크지 않지만 이 계획의 목표는 야심차다. 원자력으로 추진되는 원통형의 열 굴착 장치로
화성과 목성 위성의 두꺼운 얼음층을 뚫고 들어간 뒤 여러 대의 수중 로봇을 바닷속에 침투시키는 개념이다.
이 초소형 수중 로봇은 길이 42㎝, 무게는 2.3㎏ 에 머문다. 3D(입체) 프린팅으로 찍어낸 쐐기 모양이다.
지난 9월부터 캘리포니아 남부 패서디나의 칼텍(캘리포니아공대) 수영장에서 진행된 테스트에서 정상적으로 작동한 것으로 나타났다.
나사 엔지니어들은 이 로봇을 지금보다 3분의 1로 줄여 휴대전화 크기로 만들 계획이다.
나사는 앞서 지난해 12월 유로파나 엔켈라두스 같은 위성의 얼음층을 뚫는 열 굴착 장치인 ‘크라이오봇(Cryobot)’의 운용 계획을 공개했다.
얼음층에 내려앉은 탐사선 모선에서 발사되는 원통형 장치로, 열로 얼음을 녹이면서 아래로 미끄러져 내리는 원리다.
얼음층을 뚫는 데 필요한 열은 10킬로와트(kW)급 소형 원자로에서 얻는다.
연구진이 컴퓨터 시뮬레이션을 실시한 결과 지름 25㎝인 열 굴착 드릴에 40개의 로봇을 넣어 보내면
2시간 동안 무리 지어 다니며 바닷속 27만8000㎥를 탐사할 수 있는 것으로 나타났다.
이선 샬러 NASA 연구원은 “유로파의 얼음층 아래에는 광활한 소금물 바다가 있는데 각종 에너지원과 화합물 등
생명체에 필요한 핵심 성분을 가지고 있다”며 “초소형 수중로봇들이 무리지어 다니며 훨씬 넓은 지역을 탐사할 수 있을 것”이라고 말했다.
초소형 수중로봇에는 조지아공대가 개발한 다용도 칩이 들어간다.
이 칩은 온도, 압력, 산성도, 알칼리성, 전도도, 화학 성분을 모두 측정한다.
지난해 7월 알래스카 주노 빙원의 빙하 아래에서 실시된 시험에서는 얼음 속 시추공을 통해 로봇을 내려보내 수심 50m에서 압력과 전도도를 측정하는데 성공했다.
로봇이 수집한 정보는 소나와 비슷한 수중 통신 장치를 통해 크라이오봇에 전달된다.
이 로봇은 다시 이들 정보를 얼음 지각을 통해 달 표면의 탐사선으로 보내진 뒤 지구로 전달된다.